吉林大学人工智能学院赵超副教授关于薄型可变形物体操纵的研究成果《Learning thin deformable object manipulation with a multi-sensory integrated soft hand》近日被期刊《IEEE Transactions on Robotics》(T-RO,IF= 10.5)接收。T-RO是机器人学领域最具影响力的期刊之一,在国际机器人学术界享有极高声誉。
论文题目:Learning thin deformable object manipulation with a multi-sensory integrated soft hand
论文作者:Chao Zhao, Chunli Jiang, Lifan Luo, Shuai Yuan, Qifeng Chen, Hongyu Yu
收录期刊:IEEE Transactions on Robotics (T-RO)
期刊类别:中科院一区 Top 期刊
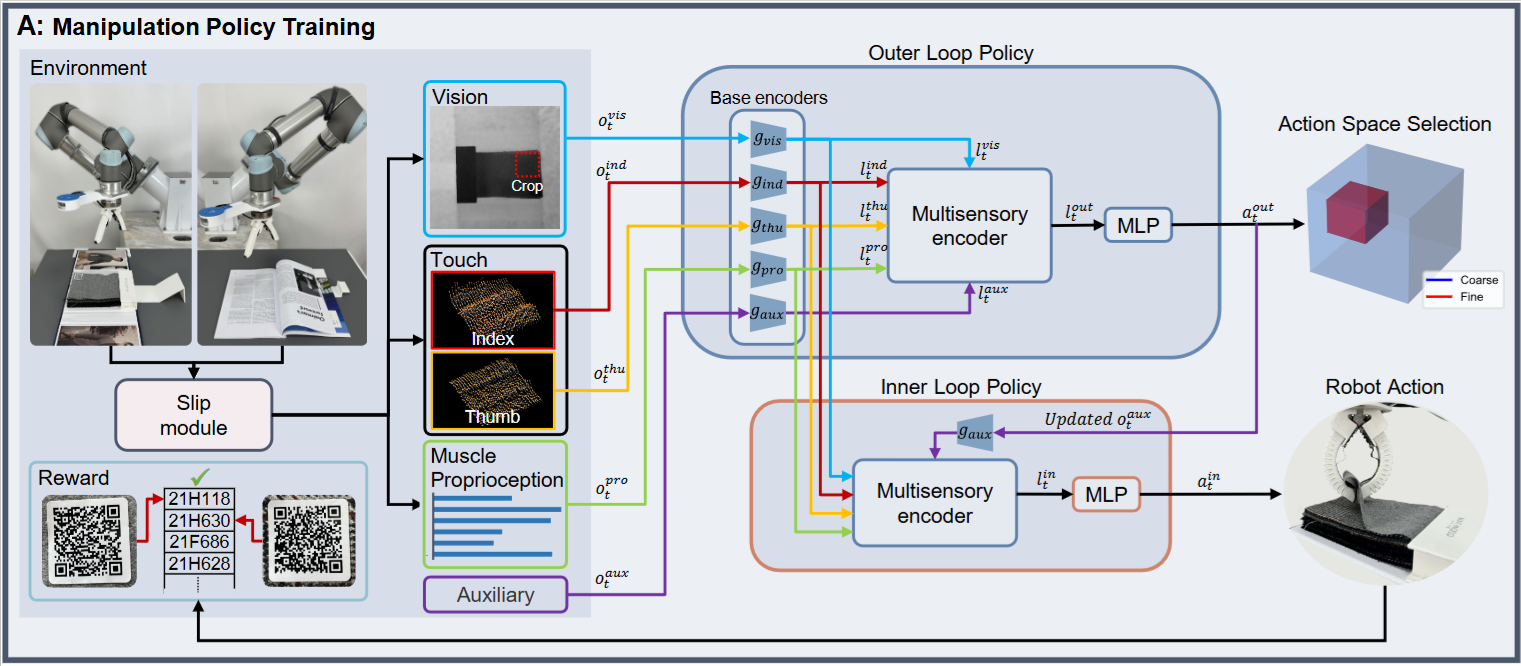
论文概述:近年来,机器人技术已取得显著进步,系统展现出极高的精度和可重复性。然而,这种卓越的精度往往无法转化为对可变形物体的有效操纵。目前的机器人系统缺乏“不精确的灵巧性”,即无需依赖精确控制,就能通过鲁棒且自适应的行为执行灵巧操纵的能力。本文主要探讨了薄型可变形物体的分离和抓取。文中提出了一种新颖的解决方案,将被动柔顺性、触觉和本体感觉融入到薄型可变形物体的操纵中。系统采用柔性欠驱动手,提供被动柔顺性,促进自适应且温和的交互,从而在无需精确控制的情况下灵巧地操纵物体。配备的触觉和F/T传感器通过提出的滑动模块收集操纵所需的传感数据。操纵策略通过无模型强化学习直接从原始传感数据中学习,绕过了显式的环境和物体建模。学习后的系统已在一系列超出先前研究能力范围的挑战性任务上进行了测试,从像销售员一样展示西装面料,到为小提琴手翻阅乐谱,不一而足。
招生信息:本文第一作者赵超,现为吉林大学人工智能学院准聘副教授。研究兴趣是开发赋予机器人智能的算法和系统,使其能够在现实环境中有效地感知、推理、行动并协助人类。研究重点详见https://robotll.github.io/czhao/。现招收2026级博士生1名、硕士生2-3名。欢迎通过邮件联系,邮件请附上简历并简要说明研究兴趣。邮箱:chaozhao@jlu.edu.cn