国际自动控制联合会世界大会(IFAC World Congress)是由国际自动控制联合会(IFAC,International Federation of Automatic Control)主办的自动控制领域国际顶级学术会议,CAA-A类会议,每三年举办一次,是全球控制科学与工程领域最具影响力的综合性学术盛会。IFAC 2026,将于2026年8月23日至28日在韩国-釜山举行。吉林大学人工智能学院师生有2篇论文被该会议接收。
论文题目:A Gauss-Newton-Induced Structure-Exploiting Algorithm for Differentiable Optimal Control
第一作者:陈原坤(2024级硕士生)
通讯作者:聂子斐
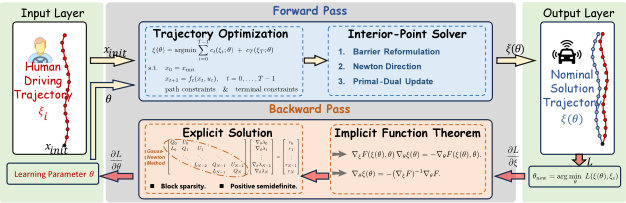
可微分优化通过将参数化优化问题嵌入神经网络构造成优化层,在保证模型决策安全性、可解释性与结构一致性的同时,支持端到端学习。然而,相较于常规神经网络层,其前向求解与反向梯度传播通常伴随着更高的计算开销,因而在实际应用中仍面临显著的效率瓶颈。针对这一问题,本文不同于现有基于等价辅助系统的间接求解思路,而是直接从微分 KKT 系统出发,对其矩阵结构进行解析与利用。在高斯-牛顿近似下,进一步结合Hessian矩阵的块稀疏结构与半正定性质,将原本计算密集的大规模通用矩阵分解转化为一系列小规模、高效率的分解计算,从而在理论上实现约50%的计算复杂度削减。实验结果表明,所提方法在合成数据集上相较基线方法可获得平均 180% 的加速,并在基于真实驾驶示范的模仿学习任务中进一步验证了其实用性与有效性。
论文题目:Event-Triggered Reference Governor with Deep Reinforcement Learning for Constrained Quadrotor UAV Control
第一作者:王榕(2022级博士生)
通讯作者:宫洵
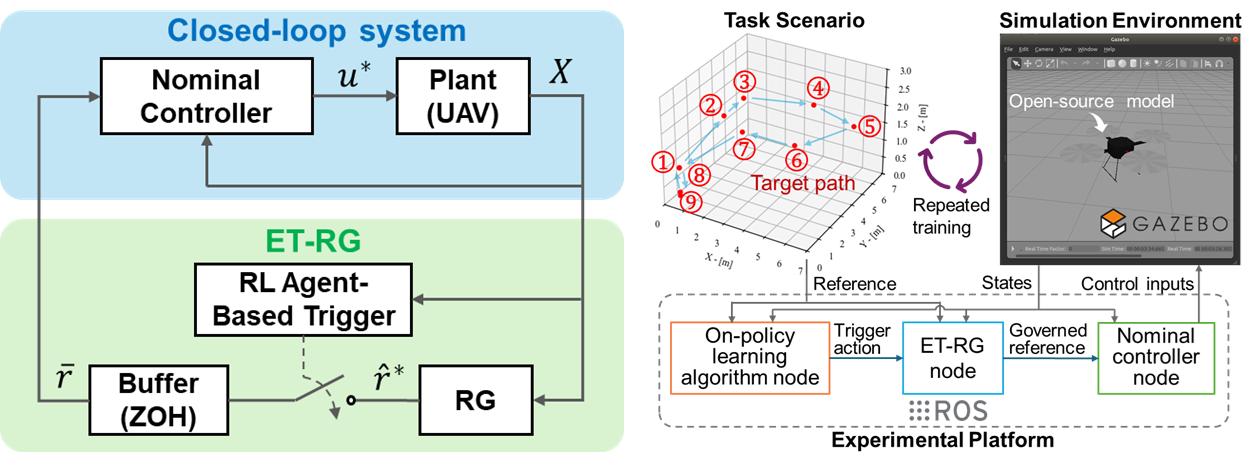
针对四旋翼无人机在飞行过程中的状态约束问题,本研究提出了一种基于事件触发机制的参考调节约束控制方法。该方法在现有线性反馈无人机控制系统的基础上,嵌入附加式参考调节器,对输入到控制系统中的参考轨迹进行适当校正,从而确保无人机的运动状态始终满足预设约束条件。同时,为在计算开销与控制性能之间取得平衡,进一步引入了基于强化学习算法的事件触发模型,并在Gazebo仿真环境中在线学习触发策略。该策略能够根据无人机的实时飞行状态,减少在不必要时刻激活参考调节的频率,从而有效降低滚动时域优化求解的计算调用次数,显著减轻系统的计算负担。


