IROS 2025(IEEE/RSJ International Conference on Intelligent Robots and Systems)将于2025年10月19日至25日在中国杭州举行,时隔20年再次回到中国。IROS是机器人领域最具影响力的国际顶级会议之一,也是中国自动化学会(CAA)推荐的A类国际学术会议。本届会议的主题为“人类-机器人前沿”,聚焦于人工智能和机器人技术的突破性进展,探索人机协作、智能系统以及机器人应用的最新前沿。
论文题目:Generalizable Category-Level Topological Structure Learning for Clothing Recognition in Robotic Grasping
第一作者:朱星宇(2024级博士研究生)
收录会议:IROS 2025(CAA-A类)
指导教师:高一星
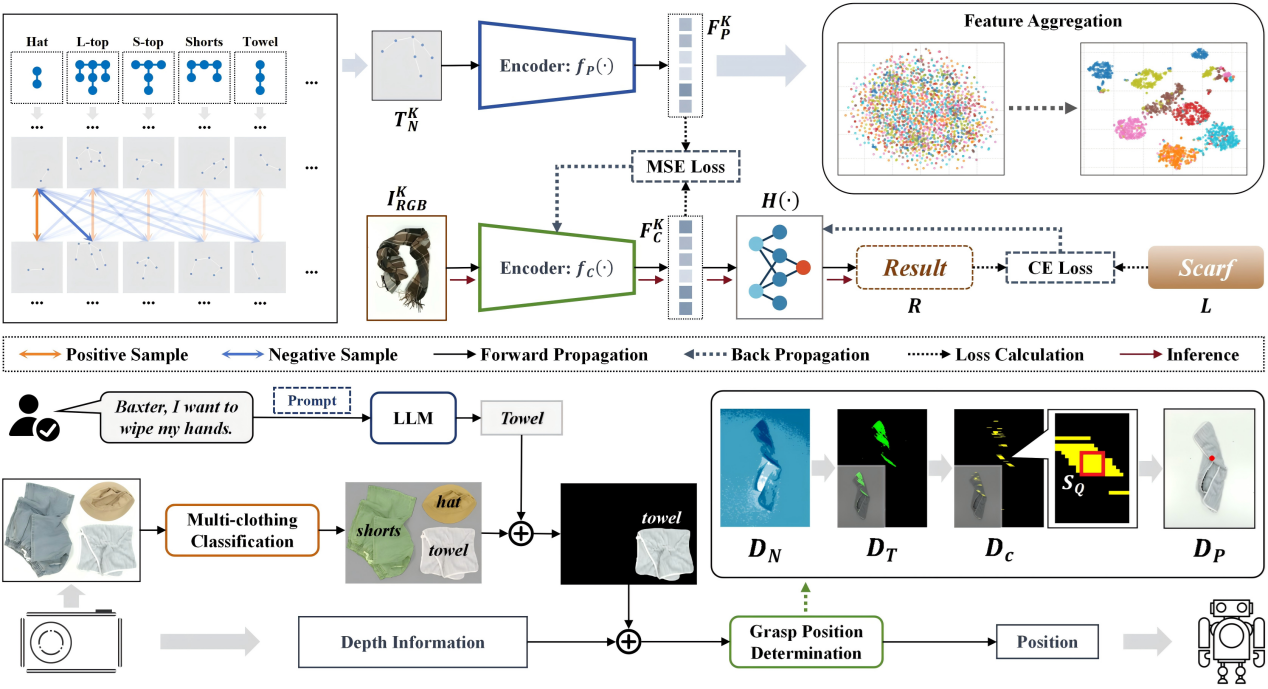
论文概述:识别各种类型的衣物对于机器人操作任务(例如机器人衣物抓取和整理以及机器人辅助穿衣等)至关重要。与刚性物体的识别不同,衣物的易形变特性导致其状态空间呈现多样化特点,这使得衣物类型的识别仍然是一项具有挑战性的任务。然而,现有的分类模型主要关注衣物的颜色和纹理,而忽略了结构特征,导致机器人无法精准区分具有相似颜色和纹理的衣物。此外,由于模型对形变衣物结构的表征能力不足,且这些模型严重依赖人工标注,导致难以高效识别具有新的颜色或纹理的未见衣物。为了应对这些挑战,论文提出了一种新颖的形变衣物拓扑结构表征和优化策略,用于类别级衣物结构特征学习。此外,论文还设计了一个基于Segment Anything Model(SAM)的多衣物区域感知框架,用于识别杂乱场景中的多个不同衣物区域。利用提出的结构特征学习策略,多衣物分类框架可以有效泛化到未见衣物。最后,论文介绍了一种针对衣物的抓取位置估计方法,并开发了相应的机器人抓取系统,该系统能够根据用户指令选择和抓取指定的衣物。多次机器人抓取实验证明了系统的有效性,并与多个基准模型进行了全面的性能分析和比较,进一步体现了所提出方法的优越性。