IROS 2025(IEEE/RSJ International Conference on Intelligent Robots and Systems)将于2025年10月19日至25日在中国杭州举行,时隔20年再次回到中国。IROS是机器人领域最具影响力的国际顶级会议之一,也是中国自动化学会(CAA)推荐的A类国际学术会议。本届会议的主题为“人类-机器人前沿”,聚焦于人工智能和机器人技术的突破性进展,探索人机协作、智能系统以及机器人应用的最新前沿。
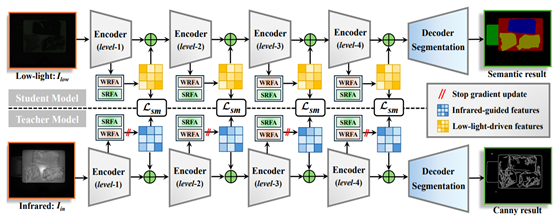
论文题目:DarkSeg: Infrared-Driven Semantic Segmentation for Garment Grasping Detection in Low-Light Conditions
第一作者:仲海锋(2023级博士研究生)
收录会议:IROS 2025(CAA-A类)
指导教师:高一星
论文概述:低光环境下的衣物抓取是家用智能机器人面临的一个重要挑战,但现有的研究尚未充分解决这一问题。在低光条件下,由于光照不足导致的稀疏结构特征使得不同类别的衣物往往会产生高度的特征混淆,阻碍了机器人识别和定位不同类别衣物的能力。虽然传统方法可以通过融合红外特征来弥补低光图像的特征缺陷,但其复杂的计算过程会带来巨大的计算开销。为了解决这一限制,我们提出了一个基于学生-教师特征互动的低光衣物检测模型DarkSeg。DarkSeg的创新之处在于将复杂的多模态特征融合替换为学生和教师模型之间间接的特征对齐与互动,从而规避了高计算需求。通过特征对齐,DarkSeg使学生模型能够从教师模型提供的红外特征中学习光照不变的结构表示,有效地纠正了低光图像的结构缺陷。此外,为了评估DarkSeg在低光条件下进行衣物抓取的可行性,我们提出了一种深度感知抓取策略,并构建了一个多模态低光衣物检测数据集DarkClothes。在Baxter机器人上对DarkSeg的实验表明,与传统方法相比,DarkSeg的不仅将低光衣物抓取成功率提高了22%,同时减少了99.08M的模型参数,验证了其在低光条件下辅助机器人进行衣物抓取的可行性。