我院助理教授姚美宝指导的硕士研究生刘海强同学、程松同学近期在智能监控系统方向和轮式机器人系统方向取得了新的研究进展。
刘海强同学基于该研究撰写的论文被CCF—B类会议ICME 2021收录。以下为论文的详细信息:
通讯作者:姚美宝
第一作者:刘海强
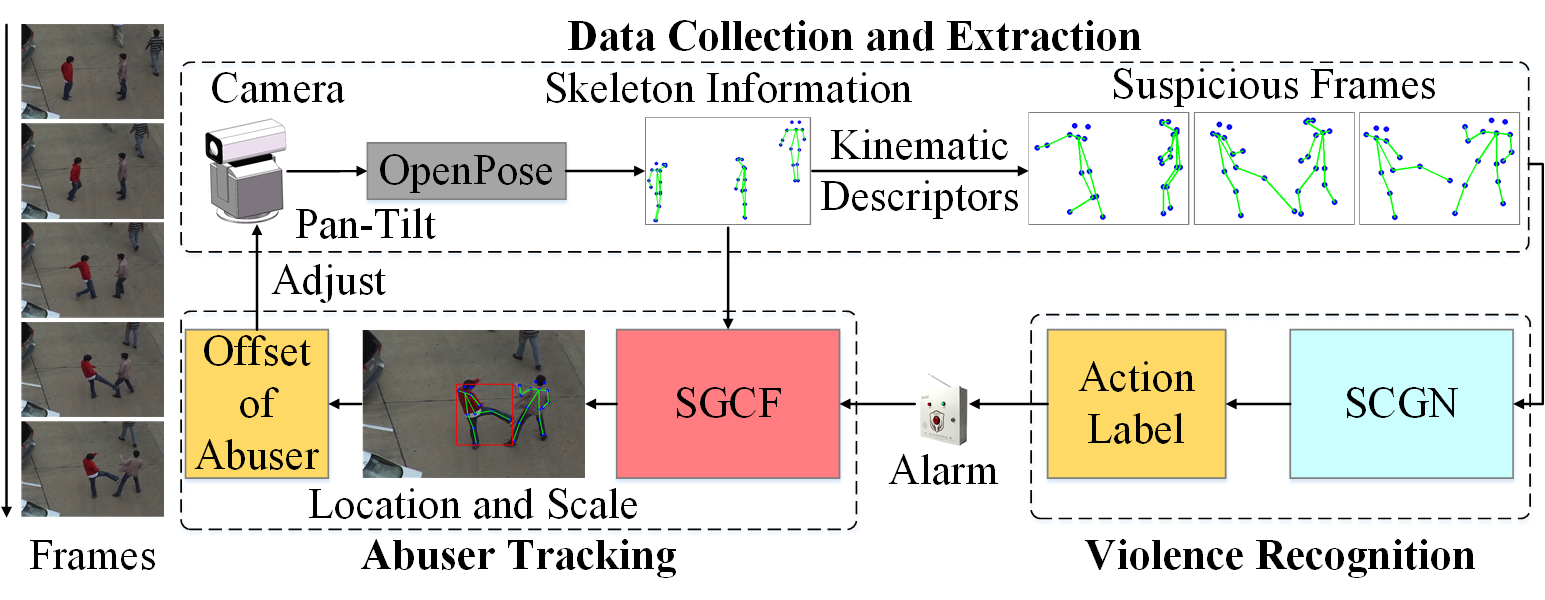
论文题目:SVRAT: A Skeleton-Based Intelligent Monitoring System for Violence Recognition and Abuser Tracking
会议名称:IEEE International Conference on Multimedia and Expo (ICME 2021)
会议类别:CCF B类会议会议时间:July 5-9, 2021.
论文概述:文章设计了一种基于骨骼信息的暴力行为智能监控系统。该系统首先采用一种新的骨骼上下文注意力网络(SCAN),用以探索人体骨骼序列的时空间信息,识别监控场景中的暴力动作;然后提出一个受骨架关键点监督的相关滤波算法(SGCF),该算法在施暴者位置或速度发生大幅变化等极端情况下仍能持续捕捉其信息。基于SBU和UT数据集的实验结果表明,该系统不仅优于现有的暴力行为识别和施暴者跟踪方法,而且能以较低的总体复杂度完成这两项任务。
程松同学的论文”An Adaptive Backstepping-Based Controller for Trajectory Tracking of Wheeled Robots”被国际会议ICPS 2021接收。程松本科就读于华北电力大学自动化系,2020年起在人工智能学院攻读硕士学位,进入姚美宝老师的智能机器人实验室,主要研究方向为控制理论及应用。本篇论文通讯作者为姚美宝老师,合作者为吉林大学人工智能学院硕士研究生刘浩鸣同学。以下为论文详细信息:
第一作者:程松
论文题目:An Adaptive Backstepping-Based Controller for Trajectory Tracking of Wheeled Robots
会议名称:the 4th IEEE International Conference on Industrial Cyber-Physical Systems (ICPS 2021)
会议时间:May 10-13, 2021, Victoria, BC, Canada.
会议背景:ICPS全称为工业信息物理系统国际会议(International Conference on Industrial Cyber-Physical Systems),旨在提供一个交流研究和创新成果的平台,从工业实践中汲取灵感,如信息物理系统、数字经济、工业物联网等。ICPS每年汇聚众多业界专家、研究人员和学者,就前沿技术、突破、创新解决方案、研究成果以及与信息物理系统及其应用等方面分享想法、范式和经验。
论文简介:根据轮式机器人系统的数学模型,提出了一种基于反步法的控制器,该控制器通过神经网络自调整控制参数,增强了算法的自适应性。与此同时,由于移动机器人通常携带电池作为动力源,其运行时间受电池剩余电量的限制。为减少消耗,保护资源和环境,本次实验将机器人的能耗作为联合指标进行优化。仿真实验结果表明,所提出的控制器能够实现轮式机器人精确的轨迹跟踪,同时保证能量最小化。



